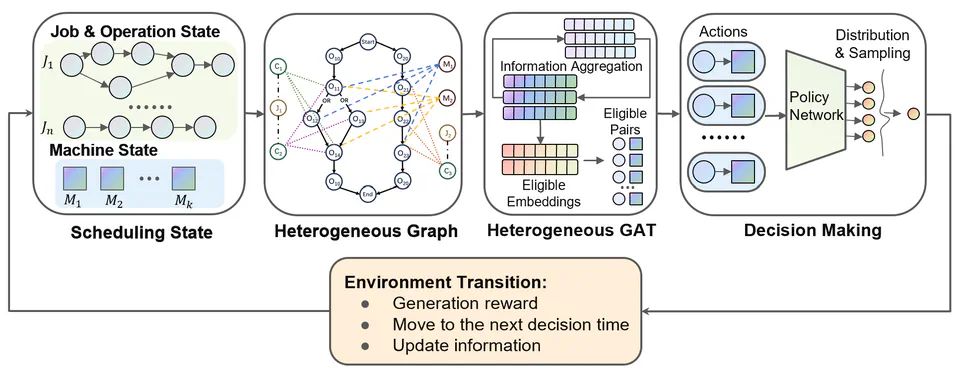
DRL4IPPS focuses on utilizing Deep Reinforcement Learning to deal with Integrated Processing Planning and Scheduling Problem, which is an extremely hard realistic problem. The proposed method can make decisions within a few seconds and outperform traditional dispatching methods, as well as obtain an improvement of 11.35% compared with OR-Tools SAT-CP Solver and the Gurobi MILP Solver with a 7200-second time limit on large instances. Please refer to Paper (arXiv) for more details.
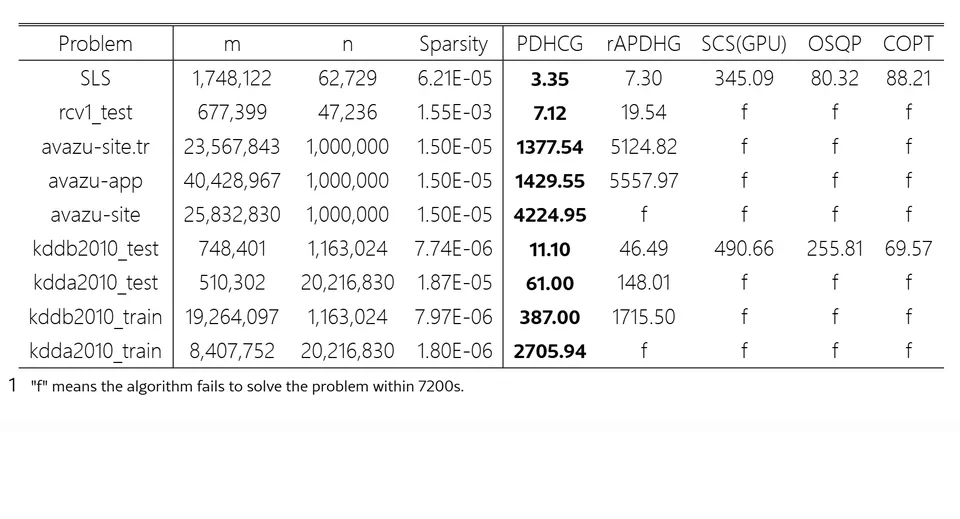
Primal-Dual Hybrid Conjugate Gradient Method (PDHCG) is a GPU-accelerated First Order Method for solving convex quadratic programming problems with state-of-the-art performance. Please refer to Paper (arXiv) for more details. Our code can be found in PDHCG.jl and PDHCG-Python.
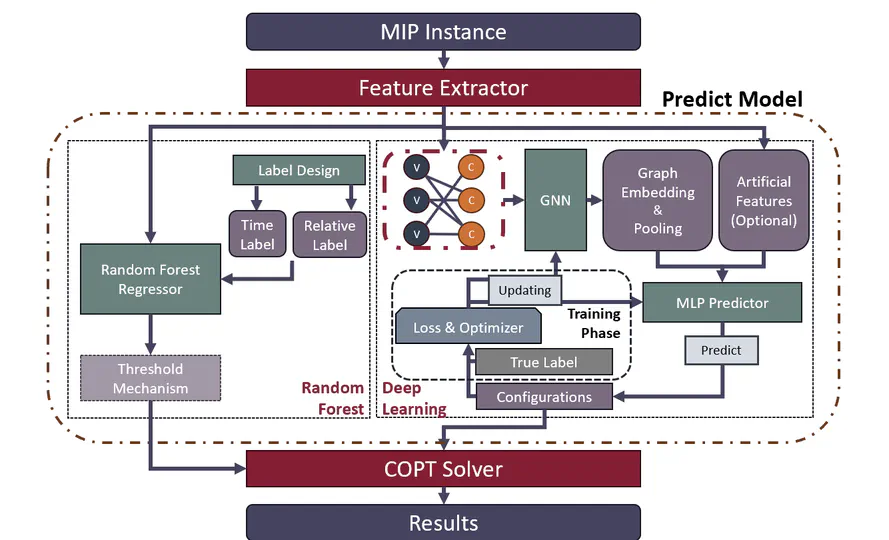
ML4MOC is a benchmark for auto-selecting MIP Optimizer’s configuration.
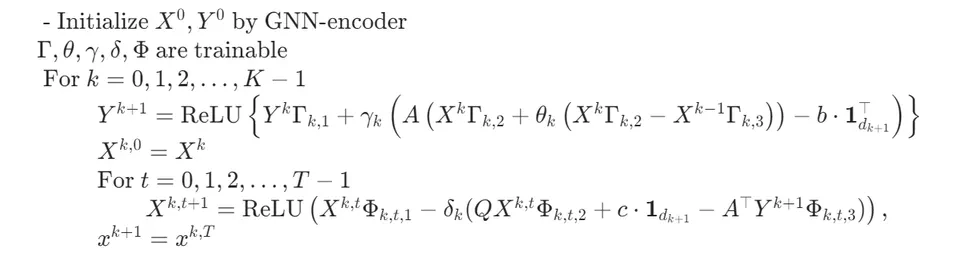
PDHCG-Net aims to use Neural Networks, inspired by the updating rule of PDHCG, to warm start QP solvers. See PDHCG-Net for more details.
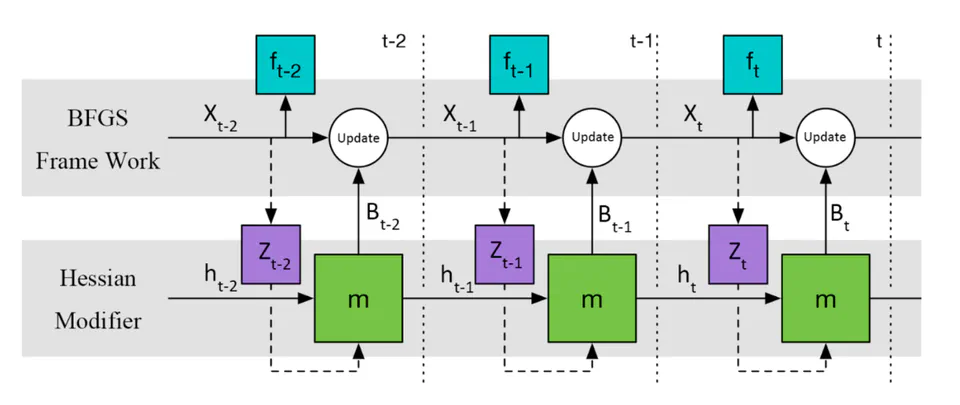
This project utlizes LSTM to approximate a precondition matrix inspired by quasi-newton method and use quasi-newton framework to optimize.